[:en]
Electronique de commande GRBL
I ) SD Micro card
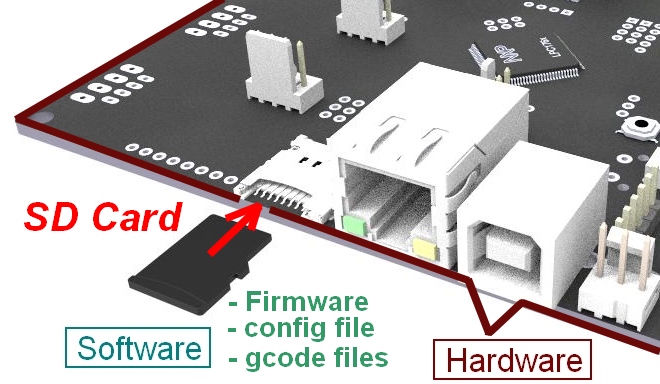
We can separate the smoothieboard controler in
Software part :
Firmware —-> can be update
config file —-> setting of smoothieboard
Gcode files —> machining path
Hardware électronic board with :
32-bit Cortex-M3 LPC1769 processor
with 512kB flash and 64kB RAM
Ethernet and USB connections
Various inputs and outputs for extensibility
Without Sd-card the smoothieboard can’t works
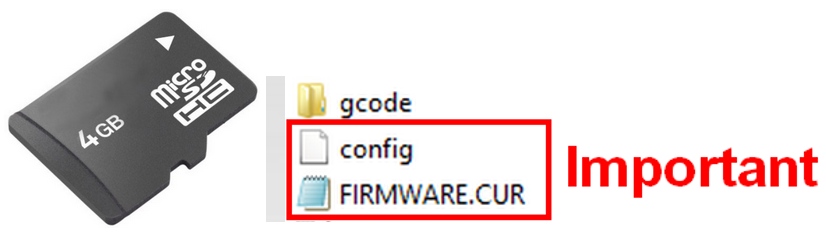 If the smoothieboard can’t read the two file more important
If the smoothieboard can’t read the two file more important
config and Firmware.cur, the smoothieboard don’t start.
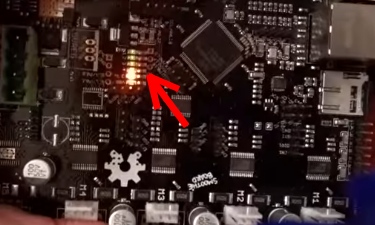
If have problem with sd-card or firmware inside sd-card.
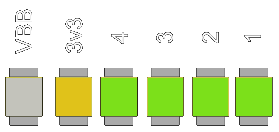
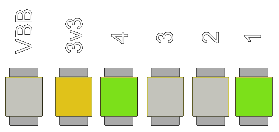
Can see with color of led.
Don’t mix smoothieboard firmware and config with gcode file.
Create special folder ‘gcode » for exemple to put machining file inside.
If you don’t can do mistake and delete sometimes important file.
Can have two more file, depend of options you choice.
-
config-override : – Created when the g-code M500 is played.
-
on_boot.gcode : – Played on startup of smoothieboard. Can be used to initialize the smoothie driven device.
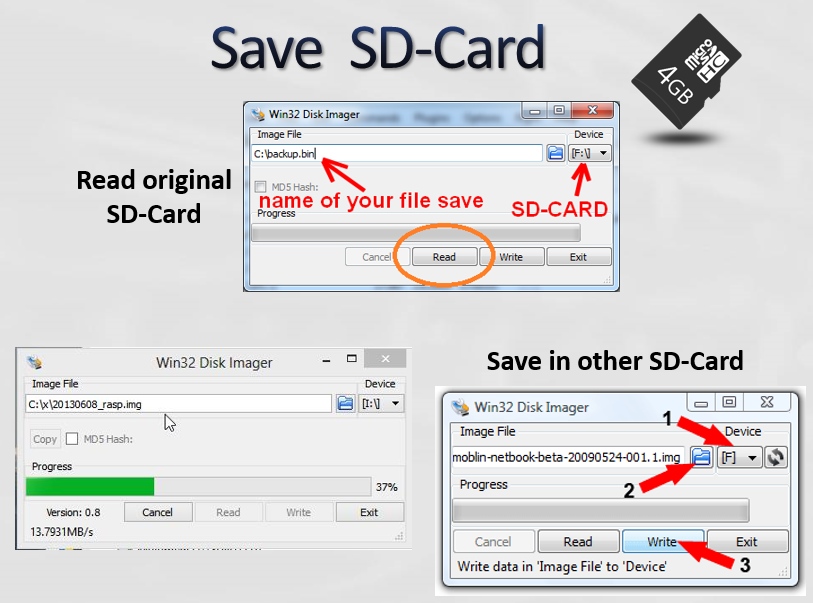
It’s important save firmware and config file in other place of sd card for exemple computer, if you change something and whant return back, can find original file.
Overway is to copy sd-card to other sd-card (like copy sd-card for raspberry pi)

|
All is normal
|
The Led 2 and 3 blink at this speed The Les 4 and 1 stay on |
|
Sd-Card problem
|
The Led 4 stay off |
|
Firmware crash
|
All green led stay on or Led 3 and 2 stay off |
For overcome problem see Troubleshooting section of smoothieboard documentation http://smoothieware.org/troubleshooting#troubleshooting-a-problem-with-your-smoothieboard
Many settings in smoothie can be set immediately with M commands, these settings are lost on reset, however they can be saved to a non-volatile storage (similar to EEPROM on other systems).
The values in the configuration file will be overridden for those configuration options.
There is a set of M-codes (M50x) documented below that allow you to save all the current settings that have Mxxx commands to set them. This is particularly convenient for parameters that require tuning, as you can use a command to modify them without having to open the file and reset the board.
As these settings can be temporarily overridden with Mxxx commands there is a way to save these settings. Once saved they are reloaded on reset or boot overriding the settings in the config file. If you then edit the config file, make sure the setting you are editing is not being overridden by the override file (M503 will tell you if there is an active override file). This can sometimes explain why editing the config file appears to have no effect.
| M-code | Description | Example | ||||
| M500 | Save settings to an override file | |||||
| M501 | load config-override file optionally specifying the extension | M501 – loads config+override, M501 test1 – loads config+override.test1 | ||||
| M502 | Delete the override file, reverting to config settings at next reset | |||||
| M503 | Display overridden settings if any | |||||
| M504 | Save the settings to an override file with specified extension | M504 blue-pla |
Crashing
Do not issue M500 or M504 when gcode is read by machine, or the machine could crash or the SD card become corrupted.
Do not
Edit the config-override file yourself, only use the commands to edit the values.
I ) SMOTHIEBOARD AXIS
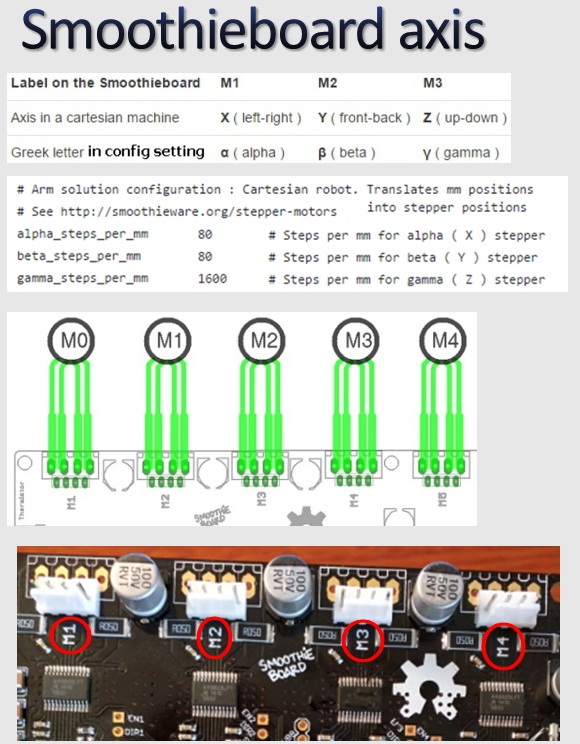
In the config file alpha match with M1 motor axis
beta match with M2 motor axis
gamma with M3 motor axis
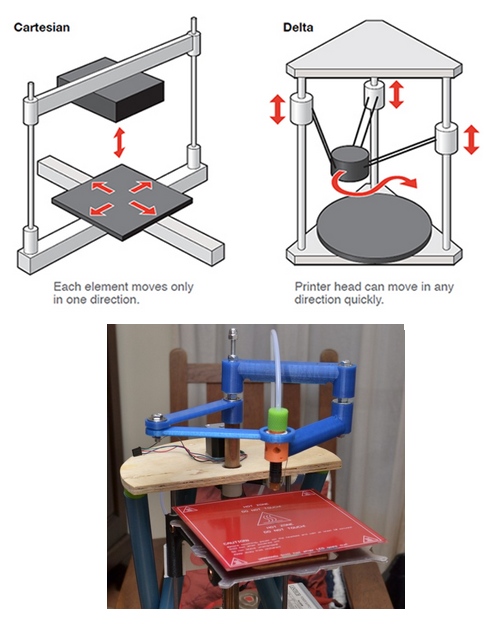
Smoothiesboard is universal for all CNC machine, no need have different electronic board for CNC Milling machine other for Laser cut machine etc. …
The config file already have inside the different function for all machine
Just change the setting about your kind of machine.
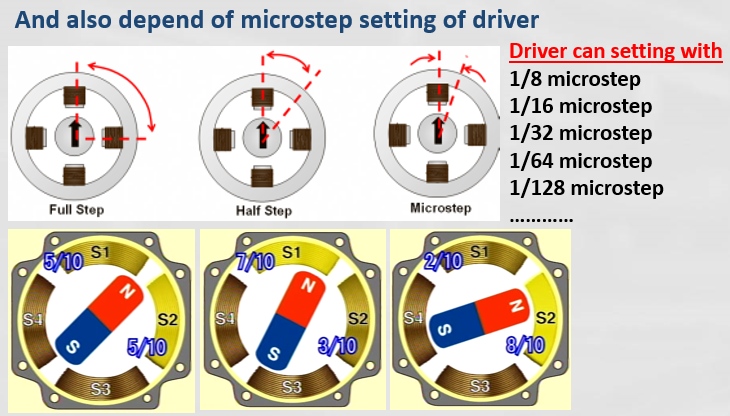
I ) OPTIONS IN THE CONFIG FILE
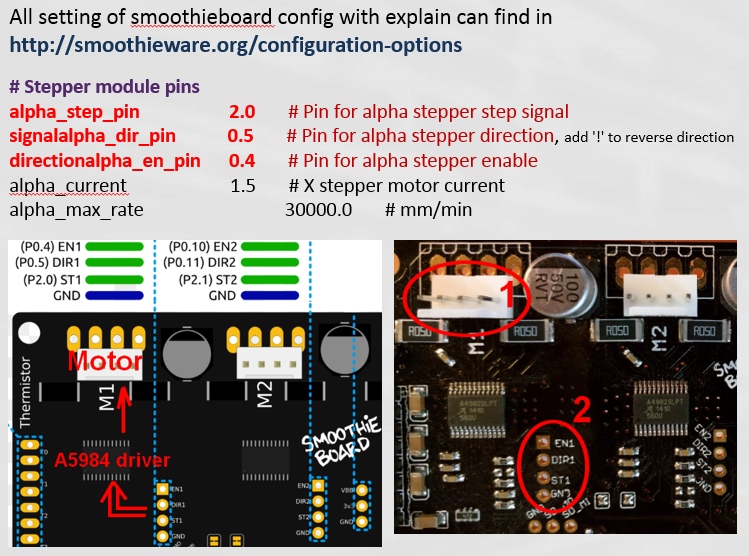 In smoothieboard, for control steppers motors, can use :
In smoothieboard, for control steppers motors, can use :
Internal stepper driver : A5984 stepper drivers with 1/32 microstepping
2A max
External stepper driver : The reason to use external is when people need more power for example 3A 4A 7A
When use internal stepper driver the motor is connect to plug write 1
When use external driver, the external driver is connect to place write 2 with EN STEP DIR and GND pin
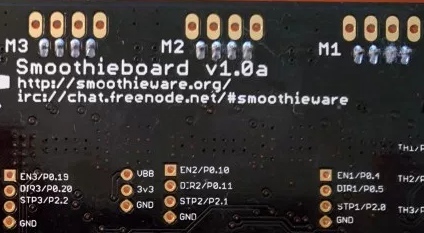
All name and number of pins are write in back face of smoothieboard
The number of pin in smoothieboard need match with number of pin in file config.
When you receive the electronic board all setting are OK
After when you understand the config of pin all can be change
have many possibilities of différents configurations.
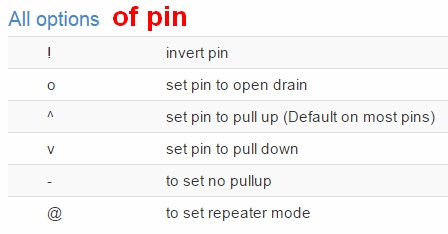
my_pin_name number of the pin (option)
For example : signalalpha_dir_pin 0.5!
alpha_min_endstop 1.24^
When the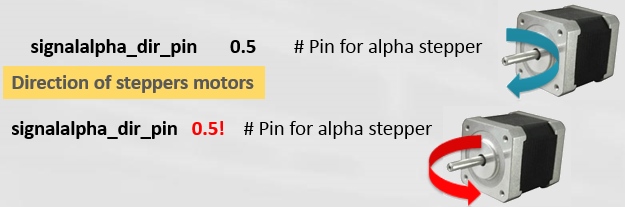 motor don’t turn in correct direction, no need change the wire, just add
motor don’t turn in correct direction, no need change the wire, just add
! after the pin number
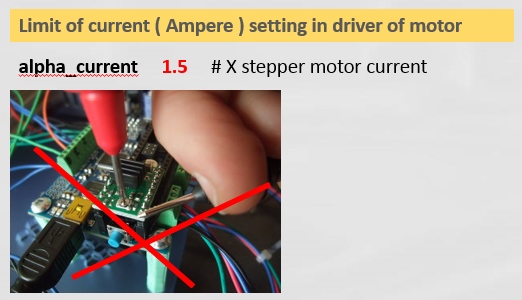 With smoothieboard, no need use screwdriver and turn potentiometer to setting with difficulty the limit of current, like drivers of a lot of 3d printer.
With smoothieboard, no need use screwdriver and turn potentiometer to setting with difficulty the limit of current, like drivers of a lot of 3d printer.
All internal stepper drivers have digital potentiometer.
Just write 1.5 in alpha_current setting and stepper driver works to 1.5A
The limit without cooling system ( fan ) is 1.6A
1.6 to 2A (max) need use fan on top of electronic.
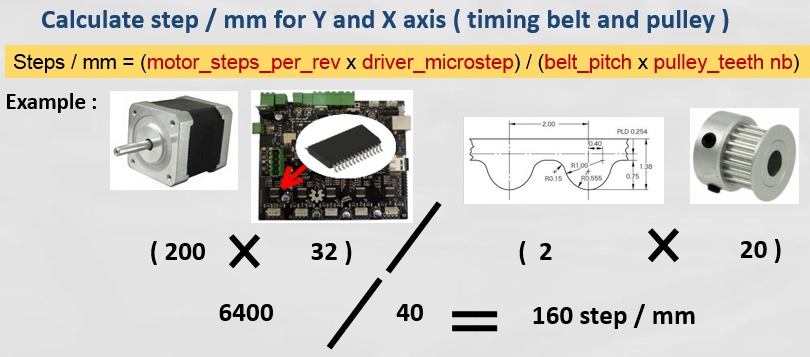
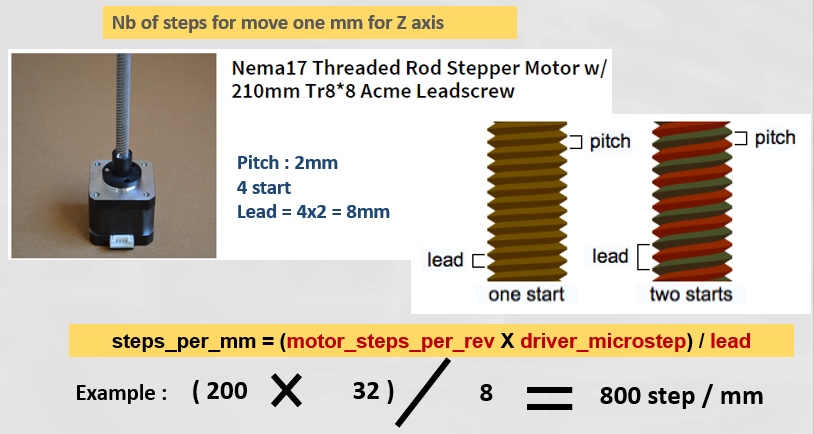
I ) The number of step for the machine move of 1mm depend of différent things
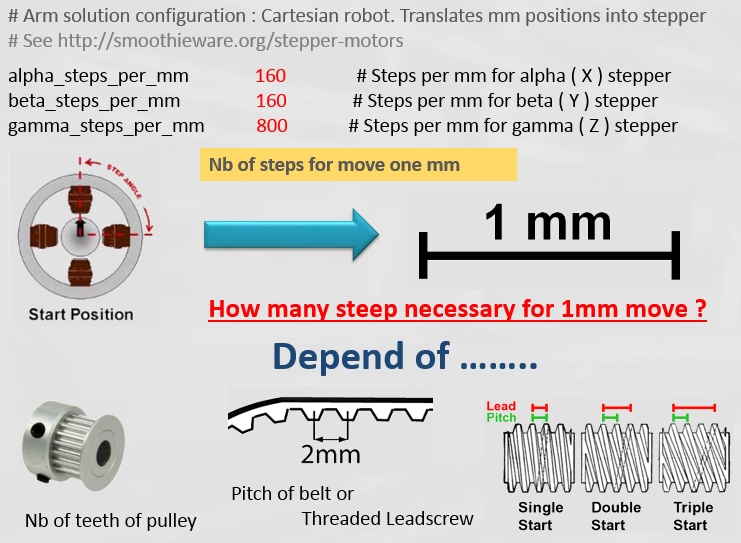
II ) Calculate for timing belt / pulley transmission
III ) Calculate for Threaded Leadscrew
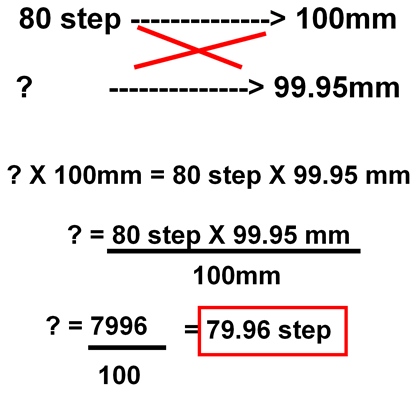
IV ) If reality a little différent theory

I was never have problem with machine move à little different than the calculate.
But if you have this just use a accurate measurement tool
and recalculate like below.
Electronique de commande GRBL
I ) SD Micro card
We can separate the smoothieboard controler in
Software part :
Firmware —-> can be update
config file —-> setting of smoothieboard
Gcode files —> machining path
Hardware électronic board with :
32-bit Cortex-M3 LPC1769 processor
with 512kB flash and 64kB RAM
Ethernet and USB connections
Various inputs and outputs for extensibility
Without Sd-card the smoothieboard can’t works
If the smoothieboard can’t read the two file more important
config and Firmware.cur, the smoothieboard don’t start.
If have problem with sd-card or firmware inside sd-card.
Can see with color of led.
Don’t mix smoothieboard firmware and config with gcode file.
Create special folder ‘gcode » for exemple to put machining file inside.
If you don’t can do mistake and delete sometimes important file.
Can have two more file, depend of options you choice.
-
config-override : – Created when the g-code M500 is played.
-
on_boot.gcode : – Played on startup of smoothieboard. Can be used to initialize the smoothie driven device.
Overway is to copy sd-card to other sd-card (like copy sd-card for raspberry pi)
|
All is normal
|
The Led 2 and 3 blink at this speed The Les 4 and 1 stay on |
|
Sd-Card problem
|
The Led 4 stay off |
|
Firmware crash
|
All green led stay on or Led 3 and 2 stay off |
For overcome problem see Troubleshooting section of smoothieboard documentation http://smoothieware.org/troubleshooting#troubleshooting-a-problem-with-your-smoothieboard
The values in the configuration file will be overridden for those configuration options.
There is a set of M-codes (M50x) documented below that allow you to save all the current settings that have Mxxx commands to set them. This is particularly convenient for parameters that require tuning, as you can use a command to modify them without having to open the file and reset the board.
As these settings can be temporarily overridden with Mxxx commands there is a way to save these settings. Once saved they are reloaded on reset or boot overriding the settings in the config file. If you then edit the config file, make sure the setting you are editing is not being overridden by the override file (M503 will tell you if there is an active override file). This can sometimes explain why editing the config file appears to have no effect.
| M-code | Description | Example | ||||
| M500 | Save settings to an override file | |||||
| M501 | load config-override file optionally specifying the extension | M501 – loads config+override, M501 test1 – loads config+override.test1 | ||||
| M502 | Delete the override file, reverting to config settings at next reset | |||||
| M503 | Display overridden settings if any | |||||
| M504 | Save the settings to an override file with specified extension | M504 blue-pla |
Crashing
Do not issue M500 or M504 when gcode is read by machine, or the machine could crash or the SD card become corrupted.
Do not
Edit the config-override file yourself, only use the commands to edit the values.
0 commentaires
Electronique de commande GRBL
Les cartes présentées ici fonctionnent avec le firmware GRBL
Plus d’info sur le firmware GRBL Ici
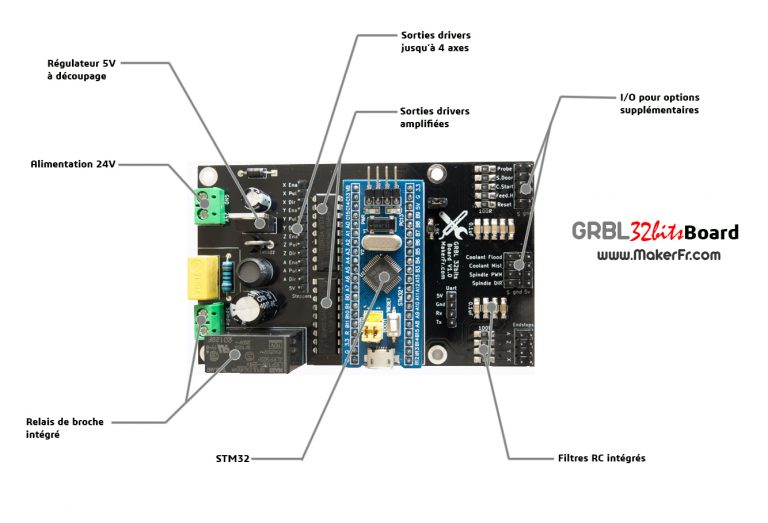
Ce kit GRBL 32bits permet de piloter des CNC jusqu’à 4 axes.
Le kit assure la fonction d’interpolateur, les drivers de pilotage des moteurs PAP sont externes !!!
Il est composé d’une partie interpolateur grâce au microcontrôleur STM32
et d’une partie affichage et liaison Wi-Fi avec le microcontrôleur ESP32

I ) Partie interpolateur
Comme les GPIO du STM32 fonctionnent en 3.3v, les signaux sont amplifiés en 5V pour la compatibilité avec une multitude de drivers externes.
La carte possède un relais permettant de piloter une broche.
Plus d’info : https://www.makerfr.com/cnc/grbl-32-bits-board/presentation-grbl-32bits-board/
II ) Partie affichage et Wi FI
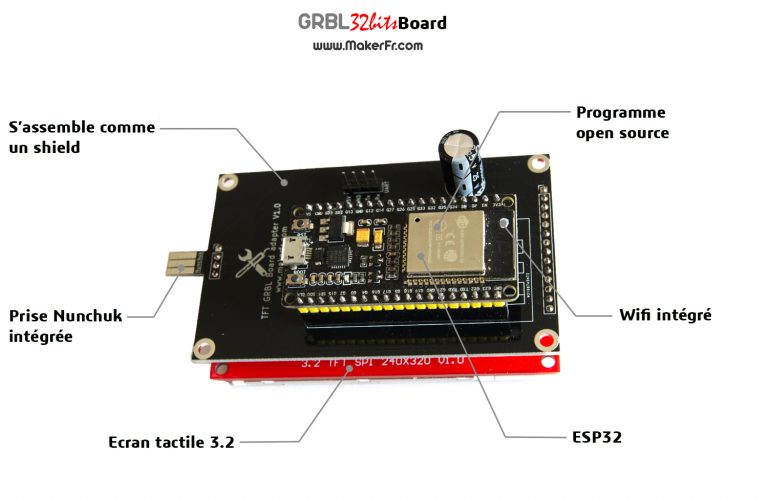
Le microcontrôleur ESP32 gère le wifi ce qui permet de se connecter à la console, d’uploader un fichier gcode sur la SD et de lancer un usinage depuis la SD via l’ordinateur.
L’affichage de l’écran tactile 3.2 est entièrement personnalisable.
Voir pour plus d’info https://www.makerfr.com/cnc/grbl-32-bits-board/mode-demploi-du-tft/
0 commentaires