[:fr]
Le robot pédagogique Thymio
- Présentation
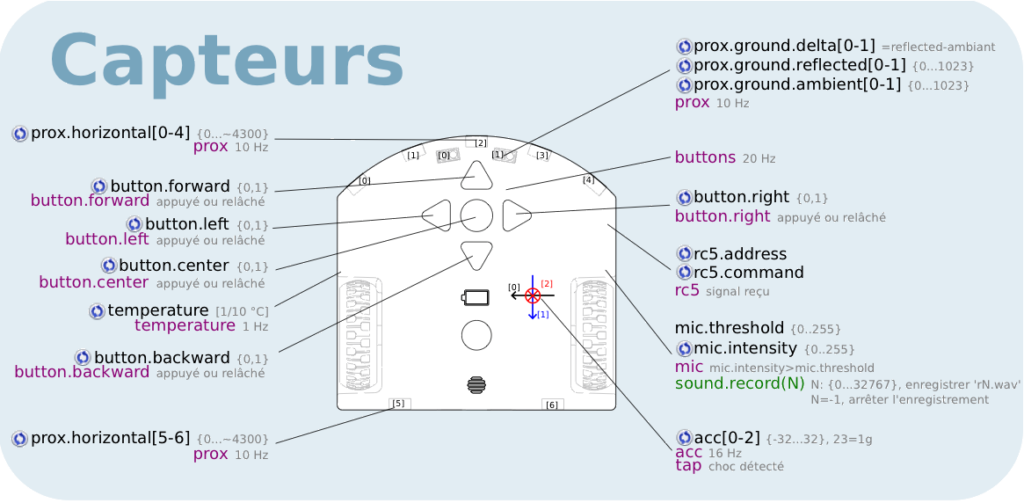
- Les capteurs de Thymio
- Les actionneurs de Thymio
- La programmation en langage Aseba
- Exemples de projets avec des robots Thymio
Lorsqu’on reçoit un robot Thymio, il possède déjà des comportements préprogrammés.
Il sera possible par la suite de modifier ces comportements et en ajouter d’autre grâce à des langages de programmation
– Langage visuel VPL : école primaire
– Langage graphique blockly ou scratch : niveau collège
– Langage Aseba : niveau lycée et université
Voici ci dessous un récapitulatif des comportements préprogrammés de Thymio
![]()


I ) Les concepts importants pour comprendre le langage Aseba
Nœud
Dans Aseba, il peut y avoir plusieurs robots ou un robot avec plusieurs processeurs fonctionnant dans le même réseau.
Ce réseau peut être logiciel (TCP), matériel (CAN), ou une combinaison des deux.
Chaque processeur d’un réseau Aseba, appelé nœud, fait tourner une petite machine virtuelle. Chaque nœud possède son propre onglet dans Aseba Studio, ce qui vous permet de le programmer indépendamment des autres nœuds. Les nœuds communiquent ensemble grâce à des événements.
Événement
Aseba est une architecture basée sur des événements, ce qui veut dire que des événements déclenchent l’exécution du code de façon asynchrone.
Les événements ont un identificateur et transportent optionnellement des données.
Les nœuds s’échangent des événements à l’intérieur d’un réseau Aseba. De plus, les événements peuvent être internes à un nœud, par exemple émis par un capteur qui possède un valeur nouvellement acquise. La réception d’un événement peut exécuter, s’il est défini, le bloc de code correspondant.
Un programme peut aussi envoyer des événements, ce qui lui permet de déclencher l’exécution de code sur un autre nœud ou de communiquer avec un programme externe.
Afin de permettre l’exécution du code lors de la réception d’un nouvel événement, aucun programme ne doit bloquer et donc les programmes ne doivent pas contenir de boucle infinie. Par exemple dans le contexte de la robotique, où un programme de contrôle de robot traditionnel travaillerait à l’intérieur d’une boucle infinie, un programme Aseba ferait simplement le travail lors d’un événement lié aux capteurs.
II ) Initiation à la programmation Aseba avec le robot Thymio
Dossier réalisé par le réseau Canopé des Yvelines
Aide mémoire sur le nommage des variables correspondant aux capteurs et actionneurs
{kind=link}
![]()
![]()
Simulation de réseau routier
Le projet sur le site officiel Thymio https://www.thymio.org/fr:roadnetwork
Rapport sur le projet en Français par l’étudiant Nenjamin Kern